工业机器人产业链分析
工业机器人产业链
工业机器人具备在高危环境下生产、生产效率高、稳定性强、精度高等特点,它是通过编程或示教方式实现自动化,同时具备拟人形态及功能的装置,主要由本体、伺服电机、减速机、控制器、传感器等核心零部件构成,操作系统包括伺服系统、控制系统、视觉系统等。
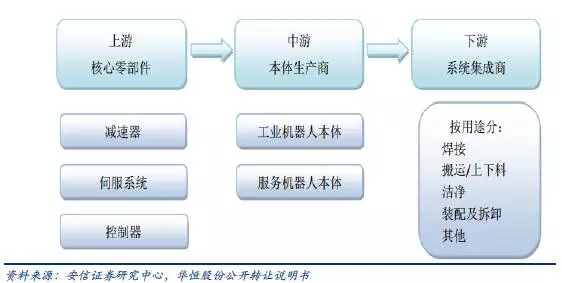
机器人自动化行业按产业链分为上游、中游和下游。上游生产核心零部件:包括减速器、伺服系统、控制器;中游是本体生产商,包括工业机器人本体、服务机器人本体。下游是系统集成商,包括单项系统集成商、综合系统集成商。
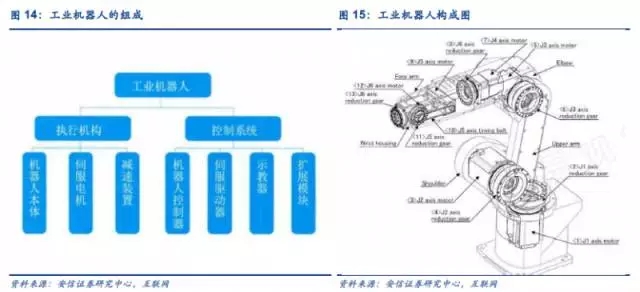
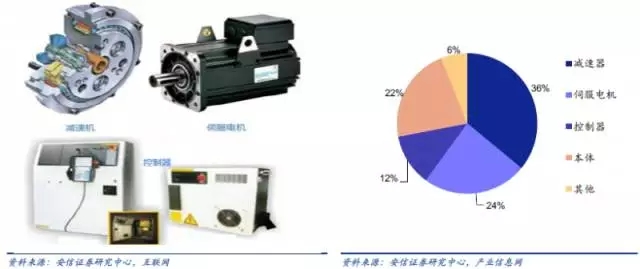
工业机器人优于传统的机械设备的原因主要在于上游的关键基础部件。从结构上来看,工业机器人由控制系统、驱动系统和执行机构组成,分别对应控制器、伺服电机和减速器等核心零部件。从成本上来看,核心零部件占工业机器人成本大头,约72%左右。多轴工业机器人的成本构成中,机械本体约占22%;伺服系统约占24%;减速器系统约占36%;控制系统约占12%;其他外设约占6%。
我国工业机器人主要集中在本体和集成端,原因在于核心零部件缺失严重抬高国内工业机器人成本,制约行业发展。多数厂商承担系统二次开发、定制部件和售后服务等附加值低的工作。关键基础部件中,减速器控制器在国内大部分知名机器人本体制造企业均已实现自主生产,但和国际水平仍有差距;而另两个关键基础部件——伺服电机和减速器,仍大量依赖进口。全球减速器行业集中度很高,两家日本公司纳博特斯(Nabtesco)和哈默纳科(Harmonic Drive)控制的全球机器人减速器市场超过75%(工业机器人用减速器轴承的开发与应用,《机械工程师》2015年第5期),包括ABB、FANUC、KUKA、MOTOMAN在内的国际主流机器人厂商的减速器均由以上两家公司提供。国内机器人市场主要采购以上两家企业的减速器,但采购成本往往较高,这成为了制约国产机器人发展的主要瓶颈之一。
国产机器人比进口机器人贵,原因在零部件上。根据产业信息网发布的《2014-2019年中国钕铁硼永磁材料产业市场分析及投资前景预测报告》,目前一台165kg焊接机器人成本国内约为29.9万元,而国外大约为16.86万元。零部件成本差异是造成国内外机器人成本差距的最大因素,其中减速器是成本差异最大部分,国内和国外和成本比达到4.4,控制器的国内外成本比,达2.6,伺服电机(驱动)的国内外成本比为1.68(1.95)。国内的材料消耗也更大,如在永磁同步伺服电机中钕铁硼材料成本,国内单体用量比国外高接近1倍。

核心零部件——市场需求广阔,亟需国产化突破
国内减速器、伺服电机市场需求广阔。一般而言,一套工业机器人的一个手臂需要配备一个减速器和伺服电机,那一套工业机器人需要配备4-6个减速器/伺服电机和1套控制系统。根据世界机器人协会的预测,2015-2017年我国工业机器人销量将保持12%的年增长率,分别达到6.395万台、7.162万台和8.022万台。假设平均一台工业机器人平均配备5个减速器/伺服电机,工业机器人精密减速器/伺服电机的2015-2017年的需求量将达到31.98万套、35.8万套和40.1万套。

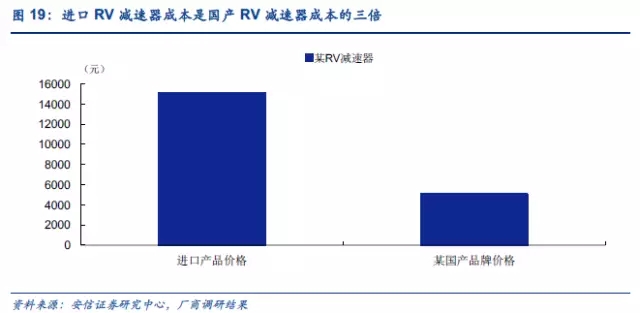
工业机器人零部件亟需国产化突破,并且是规模化量产的突破,否则没有意义。减速器是国内机器人产业必须攻克的关卡,尽管研发过程漫长充满挑战,也有少数公司经过多年研发,生产出了减速器,但未大规模量产。日本减速器掌握减速器市场的绝大份额,大规模量产,生产成本低,掌握了定价权。根据我们的草根调研,国外进口RV减速器价格是国内企业减速器产品的3倍,他们还有很大的降价空间挤压中国品牌。国内即使研发出合格的减速器,也得量产才有意义。否则没有量,就算技术达到日本标准,日本四大家机器人公司同样不会买中国的。
减速器——机器人的关节,不能缺失之痛
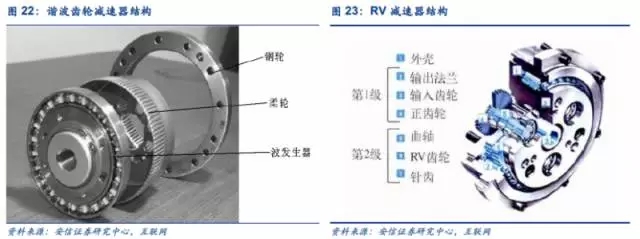
减速器对机器人意味着什么?精密减速器,是一种精密的动力传达机构,它利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。精密减速器是工业机器人最重要的零部件,工业机器人运动的核心部件“关节”就是由它构成,每个关节都要用到不同的减速机产品。

按结构不同,工业机器人用精密减速器可以分为五类,RV减速器和谐波减速器是工业机器人最主流的精密减速器。精密减速器按照结构的不同,可以分为谐波齿轮减速器、摆线针轮行星减速器、RV减速器、精密行星减速器和滤波齿轮减速器五类。在精度、扭矩、刚度、传送效率等衡量减速器的各个性能指标上,它们各有不同。其中,RV减速器和谐波减速器是工业机器人最主流的精密减速器。
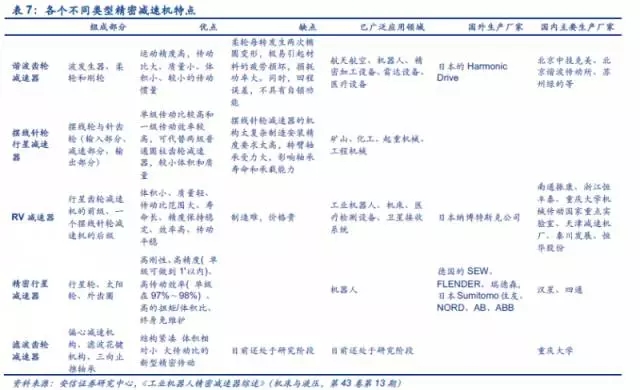
RV减速器和谐波减速器是工业机器人中使用最主要的减速器,RV减速器在先进机器人传动中有逐渐取代谐波减速器的趋势。世界75%的精密减速器市场被日本的HarmonicaDrive和Nabtesco占领,其中Nabtesco生产RV减速器,约占60%的份额,HamonicaDrive生产谐波减速器,约占15%的份额。RV减速机主要用于20公斤以上的机器人关节,谐波用在20公斤以下机器人关节。RV减速器不像谐波减速器那样随着使用时间的增长,运动精度会显著降低,在先进机器人传动中有逐渐取代谐波减速器的趋势。但由于RV减速机组成零件更复杂,承载强度更高,不光制造难度要比谐波减速机大,其生产线投资规模远大于谐波减速机。
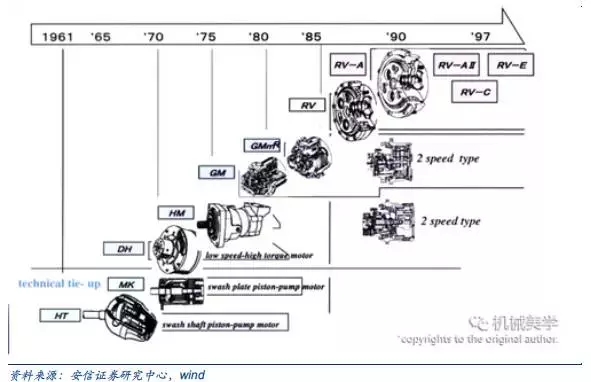
回顾减速器两巨头的前世今生,他们的减速器业务都经过了数十年的发展。如Nabtesco的RV减速器,前身正是帝人精机的主流产品。70年代开始,帝人精机减速器作为挖掘设备驱动马达的核心部件使用。80年代早期,应世界主要机器人制造商要求,帝人精机改进了RV减速器,使之更加精准可靠,符合机器人制造行业的严格要求。取得了精密摆线针轮RV减速机专利后,于1986年开始批量生产,从此开始为现代工业机器人的关节应用进行配套。可见,减速器是需要时间积淀成功的。

我国精密减速器为起步晚,逆袭挑战重重。相比日本巨头几十年的积淀,中国的工业机器人用精密减速器研究开始较晚,技术不成熟,形成了精密减速器不能自给自足的局面,严重依赖进口。RV减速器需要传递很大的扭矩,承受很大的过载冲击,保证预期的工作寿命,因而在设计上使用了过定位结构,加工十分困难。看似简单的RV减速器,实则是对我国工业基础系统的挑战。昂贵进口的通用机床不一定能生产出精密零部件,不是仅仅引进几台进口设备就可以生产制造出来的,没有吃透相关材料、热处理、工艺等是不可能生产出精密减速器的。国内有部分公司在技术水平上取得了重大突破,目前也未形成较大的销售规模。
国内涉足RV精密减速器的公司有上市公司秦川机床、上海机电、巨轮股份,新三板公司有唯一标的恒华股份,非上市公司有南通振康、恒丰泰、武汉精华、上海精华、山东帅克等,涉足谐波减速器的有非上市公司苏州绿的谐波传动科技有限公司、北京中技美克谐波传动有限公司等。
.jpg)
伺服电机:工业机器人的必不可少的关键零部件
机器人电动伺服驱动系统是利用各种电机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构,通常由伺服电机以及伺服驱动器组成。除了可以进行速度与转矩控制外,伺服系统还可以进行精确、快速、稳定的位置控制。伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补充马达间接变速装置,它将电压信号转化为转矩和转速,以驱动控制对象,可使控制速度、位置精度非常准确。
机器人对关节驱动电机的要求非常严格,交流伺服电机在工业机器人中得到广泛应用。机器人对伺服电机的严格要求:
1)快速响应性,电伺服系统的灵敏性愈高,快速响应性能愈好。
2)起动转矩惯量比大,在驱动负载的情况下,要求机器人的伺服电机的起动转矩大,转动惯量小。
3)控制特性的连续性和直线性,随着控制信号的变化,电机的转速能连续变化,有时还需转速与控制信号成正比或近似成正比,调速范围宽,能使用于1:1000~10000的调速范围。
4)体积小、质量小、轴向尺寸短,以配合机器人的体形。
5)能经受得起苛刻的运行条件,可进行十分频繁的正反向和加减速运行,并能在短时间内承受数倍过载。交流伺服驱动器因其具有转矩转动惯量比高、无电刷及换向火花等优点,在工业机器人中得到广泛应用。
.jpg)
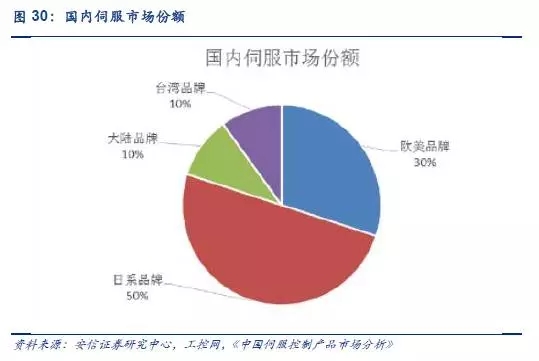
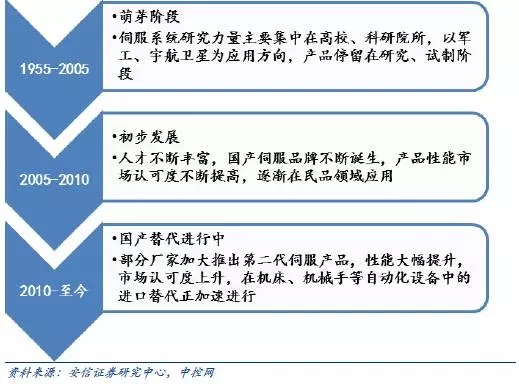
目前国内高端市场主要被国外名企占据,主要来自日本和欧美,未来国产替代空间大。目前国外品牌占据了中国交流伺服市场近80%的市场份额,主要来自日本和欧美。其中,日系产品以约50%的市场份额居首,其著名品牌包括松下、三菱电机、安川、三洋、富士等,其产品特点是技术和性能水平比较符合中国用户的需求,以良好的性价比和较高的可靠性获得了稳定且持续的客户源,在中小型OEM市场上尤其具有垄断优势。未来五年,我国伺服系统行业受益于产业升级的影响,将保持较快增长,国产替代空间还很大。
国产伺服产品将重现国产发频器癿光辉历程,进口替代加速迚行。起步相对较早的国产变频器已经在OEM市场取得较好成绩,而国产伺服产品技术正在不断进步,我们认为本土伺服产品未来有望复制国产变频器的发展路线,在OEM进口替代市场取得较大突破。
中国内较大的伺服品牌市场包括上市公司埃斯顿、汇川技术、华中数控、广州数控、和利时、新时达,新三板公司北超伺服。其中,汇川技术提供的机器人解决方案中伺服电机和数控系统基本实现自给,新时达、埃斯顿部分型号机器人开始使用自行研制的控制器和伺服系统,北超伺服能够为客户提供电机与驱动器一体化产品。
控制器:与国际差距最小的机器人零部件
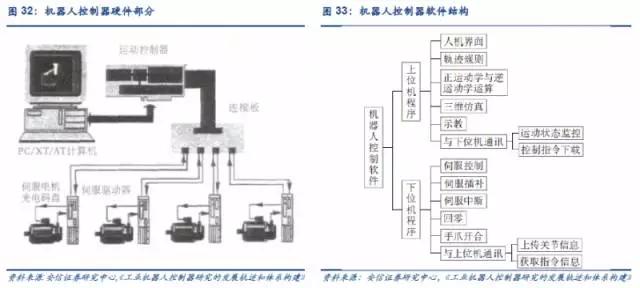
机器人控制器是机器人控制系统的核心大脑。控制器的主要任务是对机器人的正向运动学、逆向运动学求解,以实现机器人的操作空间坐标和关节空间坐标的相互转换,完成机器人的轨迹规划任务,实现高速伺服插补运算、伺服运动控制。机器人控制器由机器人控制器硬件和机器人控制器软件组成。机器人控制器的软件部分是工业机器人的“心脏”,随着科技的发展,工业机器人从下位机到上位机的应用软件方面都有了不同程度的研究成果。
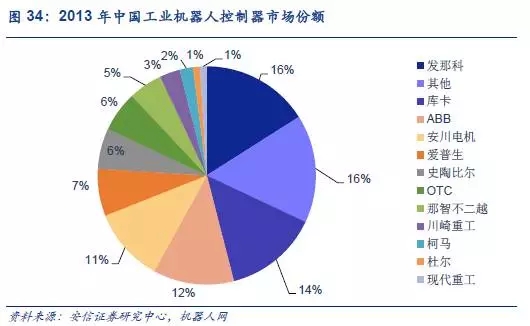
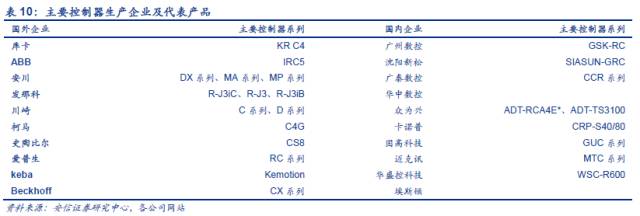
控制器的市场份额基本和机器人保持一致,国内企业控制器尚未形成较大市场份额。控制器、软件与本体一样,一般由机器人厂家自主设计研发。目前国外主流机器人厂商的控制器均为在通用的多轴运动控制器平台基础上进行自主研发,各品牌机器人均有自己的控制系统与之匹配。因此控制器的市场份额基本和机器人保持一致,国内企业控制器尚未形成市场竞争优势。
国内企业机器人控制器产品已经交为成熟,是机器人产品中与国外产品差距最小的关键零部件,国内控制器与国外产品存在的差距主要在控制算法和二次开发平台的易用性方面。控制系统的开发涉及较多的核心技术,包括硬件设计,底层软件技术,上层功能应用软件等,随着技术和应用经验的积累,国内机器人控制器所采用的硬件平台和国外产品相比并没有太大差距,差距主要体现在控制算法和二次开发平台的易用性方面。
未来几年中国国产机器人将得到快速发展,国产机器人控制器应用市场面临较好的发展契机,尤其是在运动控制领域深耕多年的企业。机器人轴数越多,对控制器性能要求也越高:机器人自由度的高低取决于其可移动的关节数目,关节数愈多,自由度越高,位移精准度也越高,其所使用的伺服电机数量就相对较多,即越精密的工业型机器人所用的伺服电机数量愈多。一般每台多轴机器人由一套控制系统控制,也意味着控制器性能要求越高。随着中国工业机器人的快速发展,具有较强研发能力的公司会具备更强的竞争优势。
本体:打通上下游产业链,体现于入口价值
机器人本体是什么?机器人本体属于设备集成的范畴。按照机械结构分,机器人本体可分为直角坐标机器人、SCARA机器人、关节型机器人、并联机器人及其他。不同种类或行业的机器人,对技术指标有不同的侧重要求。如汽车行业的焊接机器人对关节型机器人本体有较高精度和速度和要求,而码垛类机器人、搬运机器人则对负载能力要求比较高,应用于电子行业较多的SCARA机器人则对精度和速度要求比较高。全球工业机器人市场主要为关节型全球工业机器人。

机器人本体企业可以有效整合上游零部件企业和下游系统集成商。机器人本体制造商负责工业机器人支柱、手臂、底座等部件与精密减速器等零部件生产加工组装及销售,应用和集成可以本体企业自己实施,也可以给集成商来完成,本体企业具有有效整合上游零部件和下游系统集成商的入口能力。国际上的工业机器人本体制造商包括库卡、ABB、发那科、安川电机等。国内包括新松机器人、广州数控、锐奇股份、埃斯顿、埃夫特、佳士科技、亚威股仹等。国内大多数机器人本体公司以采购集成为主。
.jpg)
2014年我国工业机器人本体市场规模84亿,预计2018年机器人本体市场规模为300亿,还有2.7倍的空间。根据世界机器人协会的最新数据和《中国制造2025》工业机器人技术路线图,预计我国机器人市场未来4年复合增速约为30%,若以20万元/台的测算,则2018年我国机器人本体市场规模为300亿,是2014年的2.67倍。

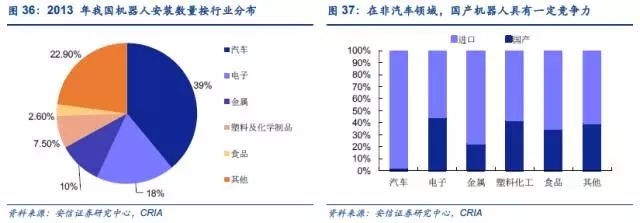
经济型本体是国产机器人本体的发展方向。国外机器人行业伴随汽车行业的成长,而且汽车行业对机器人精度、效率和稳定性要求都非常高。在汽车领域,国内机器人企业短期不能和国外企业竞争。开发应用于汽车产业以外一般制造业的经济型机器人是国产机器人本体现阶段的发展方向。经济型本体包括低成本的六轴通用机器人和三、四轴专用机器人。经济型本体分为两类:
1)国产核心零部件可以突破,国内机器人企业可以批量化生产降低成本的通用六轴关节机器人;
2)应用于某一领域的专用机器人,如用于电子行业的SCARA机器人、桌面机器人就属于经济型本体中的专机,这类专用机器人通常三、四轴(国外通常称为机械手)。
在电子、家电制造、金属制造、塑料化工、食品等行业,外资机器人企业行业经验和客户基础优势并不明显,客户更加注重机器人产品的性价比,这是国产机器人的超车机会。
长期看好能研制出适合中国市场需求的,具备成功五要素的机器人企业。“伺服系统”、“控制器”、“核心算法”、“精密减速器”,以及“应用和集成技术”这五大核心技术被称为机器人本体的“成功五要素”。国内机器人本体要发展的好,在这五大领域至少要有2个是擅长的。首先伺服系统和控制器这两块要吃透,然后在核心算法方面需要做到比较好。高精度机械传动(即减速机)可以采用外购。应用和集成可以本体企业自己实施,也可以给集成商来完成。
工业机器人产业链分析:等您坐沙发呢!
发表评论
微博
关于火星
 杯子寂寞,被人倒进了开水,滚烫的感觉,杯子想这就是恋爱的感觉吧。水变温了,杯子很舒服,想着就是生活的感觉吧。水变凉了,杯子害怕,也许这就是失去的感觉吧。水变得彻底的凉,杯子很难受,想把水倒出,水终于倒掉。杯子很舒服,但杯子也掉在地上摔成一片一片的。杯子发现每一片上都有水留下的痕迹,它知道心里还爱着水,它想完整地再爱一次水,却不可能了。难道只有失去后才懂得珍惜,只有等一切过去才知道幸福,它明白了要好好珍惜现在所用有的……
杯子寂寞,被人倒进了开水,滚烫的感觉,杯子想这就是恋爱的感觉吧。水变温了,杯子很舒服,想着就是生活的感觉吧。水变凉了,杯子害怕,也许这就是失去的感觉吧。水变得彻底的凉,杯子很难受,想把水倒出,水终于倒掉。杯子很舒服,但杯子也掉在地上摔成一片一片的。杯子发现每一片上都有水留下的痕迹,它知道心里还爱着水,它想完整地再爱一次水,却不可能了。难道只有失去后才懂得珍惜,只有等一切过去才知道幸福,它明白了要好好珍惜现在所用有的……
分类
| 一 | 二 | 三 | 四 | 五 | 六 | 日 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 | ||
近期文章
- 2025 年跨境海外仓推荐,智能技术如何助力出海供应链
- PhET:一套免费在线互动仿真程序
- 找图片素材就上这30个网站,高清/4K,无水印,赶紧收藏好!
- 产品必须了解的6大分析模型
- 2024国外不需要备案最便宜的域名注册商推荐
近期评论
- 发表在《副业国外广告联盟——轻松年入5万美元全指南(最详细)》
- 发表在《副业国外广告联盟——轻松年入5万美元全指南(最详细)》
- 发表在《网络重装DD一键脚本支持Debian/Ubuntu/CentOS系统》
- 发表在《Oracle甲骨文重装系统-一键DD系统,以及Error, Not found interfaces config.解决办法》
- 发表在《linux免费安装aaPanel控制面板》
归档
- 2025 年 12 月
- 2025 年 10 月
- 2024 年 8 月
- 2024 年 5 月
- 2024 年 4 月
- 2024 年 3 月
- 2023 年 11 月
- 2023 年 10 月
- 2023 年 9 月
- 2023 年 8 月
- 2023 年 7 月
- 2023 年 5 月
- 2023 年 4 月
- 2023 年 3 月
- 2023 年 2 月
- 2023 年 1 月
- 2022 年 12 月
- 2022 年 11 月
- 2022 年 10 月
- 2022 年 9 月
- 2022 年 8 月
- 2022 年 5 月
- 2022 年 4 月
- 2022 年 3 月
- 2022 年 2 月
- 2022 年 1 月
- 2021 年 12 月
- 2021 年 11 月
- 2021 年 10 月
- 2021 年 9 月
- 2021 年 8 月
- 2021 年 7 月
- 2021 年 6 月
- 2021 年 5 月
- 2021 年 4 月
- 2021 年 3 月
- 2021 年 2 月
- 2021 年 1 月
- 2020 年 12 月
- 2020 年 11 月
- 2020 年 10 月
- 2020 年 9 月
- 2020 年 8 月
- 2020 年 7 月
- 2020 年 5 月
- 2019 年 10 月
- 2019 年 9 月
- 2019 年 4 月
- 2019 年 3 月
- 2019 年 1 月
- 2018 年 11 月
- 2018 年 9 月
- 2018 年 2 月
- 2018 年 1 月
- 2017 年 11 月
- 2017 年 10 月
- 2017 年 9 月
- 2017 年 8 月
- 2017 年 7 月
- 2017 年 6 月
- 2017 年 5 月
- 2017 年 2 月
- 2016 年 10 月
- 2016 年 8 月
- 2016 年 6 月
- 2016 年 5 月
- 2016 年 4 月
- 2016 年 2 月
- 2016 年 1 月
- 2015 年 12 月
- 2015 年 11 月
- 2015 年 10 月
- 2015 年 9 月
- 2015 年 6 月
- 2015 年 4 月
- 2015 年 3 月
- 2014 年 12 月
- 2014 年 11 月
- 2014 年 8 月
- 2014 年 7 月
- 2014 年 6 月
- 2014 年 5 月
- 2014 年 3 月
- 2014 年 1 月
- 2013 年 8 月
- 2013 年 7 月
- 2013 年 6 月
- 2013 年 5 月
- 2013 年 4 月
- 2012 年 12 月
- 2012 年 11 月
- 2012 年 10 月
- 2012 年 9 月
- 2012 年 6 月
- 2012 年 5 月
- 2012 年 4 月